What Missions do
Factory Missions are structured workflows for taking on large, multi-feature work with Droid. Instead of tackling everything in a single session, you collaborate with Droid upfront to build a plan — features, milestones, and the skills needed to accomplish each part — then hand off execution to an orchestration layer that manages the work. Access Missions with the/missions command (also available via /mission).
Collaborative Planning
Work with Droid to define features, milestones, and success criteria before any code is written.
Skill-Aware Execution
Existing skills are leveraged and new specialized skills are developed for each part of the work.
Structured Orchestration
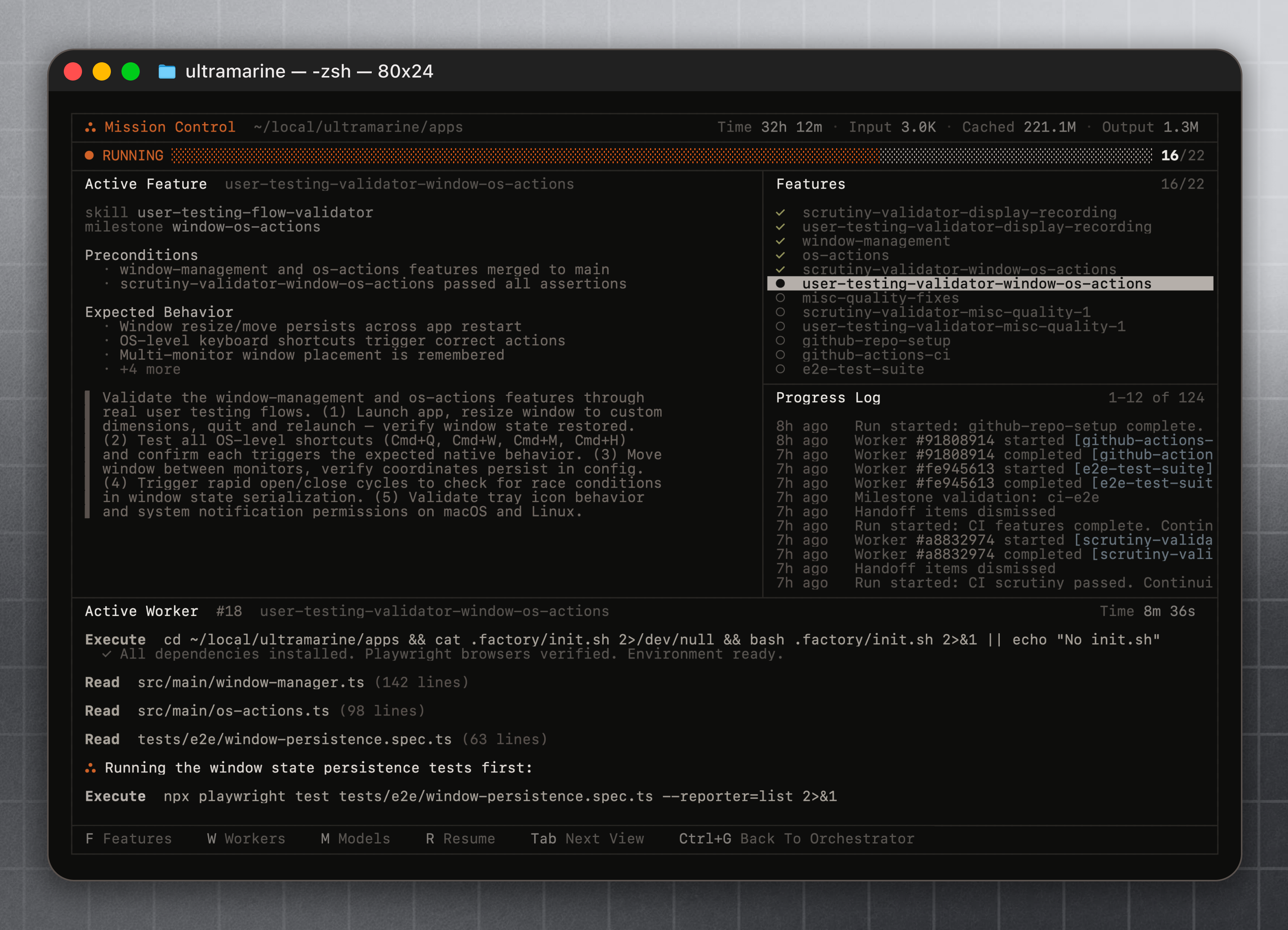
Mission Control manages execution across agents, tracking progress through your plan.
Your Config Carries Over
MCP integrations, skills, hooks, and custom droids all work inside Missions.
For optimal outcomes
How it works
Collaborate on the plan
Droid interacts with you back and forth to understand your goal. It asks clarifying questions, probes for constraints, and works with you to define what you actually want built. This is a conversation, not a one-shot prompt.
Build features and milestones
Based on the conversation, Droid constructs a structured plan: a set of features organized into milestones. Each milestone represents a meaningful checkpoint in the work.
Skills are leveraged or developed
Droid pulls in your existing skills where they apply, and develops specialized skills for parts of the work that need them. This means the execution is tailored to your project and workflow, not generic.
What Missions are good for
We have built and tested Missions across a range of work:- Full-stack development — Building complete applications with frontend, backend, database, and deployment.
- Research — Deep investigation tasks that require exploring multiple approaches, synthesizing findings, and producing structured output.
- Brownfield migrations — Modernizing existing codebases, swapping frameworks, or restructuring large projects while preserving existing behavior.
- Ambitious prototypes — Product experiments that need to be functional, not just sketched out.
Open questions
Missions are early. We are shipping this as a research preview because there are fundamental questions we are still working through:- Is parallelization necessary? Running multiple agents in parallel sounds good in theory, but does it actually produce better results than sequential execution? We are testing this.
- How do you maximize correctness? Long-running plans accumulate errors. What validation and correction strategies work best at each stage?
- Cost vs. quality tradeoffs — How aggressive should the orchestrator be? More planning and validation means higher cost but potentially better output. Where is the right balance?
See also
- Planning & Validation — Get the upfront plan right and tune validation frequency
- Running in the CLI — Monitor, intervene, and redirect from the terminal
- Running in the Desktop/Web — The visual Mission Control dashboard
- Troubleshooting — Recover from frozen missions, stuck workers, and blocked milestones
- Configuration & Reference — Headless execution, settings, and enterprise policy
- Specification Mode — For well-scoped tasks that benefit from planning before implementation
- Implementing Large Features — Manual workflow for multi-phase projects
- Custom Droids — Build specialized subagents that Missions can use
- Skills — Create and manage skills that Missions can leverage